
Select 'Part 1 - Interface' to start the tutorial. After successfully completing this part, new sections and all subsequent ones will be accessible in this menu.
The currently examined element is indicated by a green outline and numbering. Explanations will be provided in this window. After reviewing the information, click the 'Next' button or follow the instructions. If you wish to go back to the previous step, click 'Back'. If you decide to finish the study prematurely or choose another section, click 'End'.
Message
0
ADLL (Admiralty Digital List of Lights) is a digital list of navigational lights published by the UK Admiralty. It includes data on the location, characteristics, and visibility range of lights used for navigation. The ADLL is used for route planning and ensuring the safe passage of vessels by providing up-to-date and detailed information about lights, lighthouses, and other navigational aids.
ADLL
1
ADRS (Admiralty Digital Radio Signals) is a digital reference guide of radio signals published by the UK Admiralty. It includes data on various radio navigation systems, distress signals, weather warnings, and other important information for mariners. ADRS is used to ensure the safety of navigation by providing shipmasters with real-time data on radio communication and navigational warnings.
ADRS
2
AIS (Automatic Identification System) is an automatic identification system used for exchanging information between ships and shore stations. The AIS transmits data on the vessel's position, course, speed, and other critical information. This helps prevent collisions, improves navigation, and enhances maritime safety. AIS allows shipowners and operators to track their vessels in real-time and receive information about other nearby ships.
AIS
3
ARPA (Automatic Radar Plotting Aid) is an automatic radar system designed for tracking and plotting the courses of vessels. It processes radar data and automatically calculates information about the movement of other ships, such as their speed, course, and the closest point of approach to your vessel. ARPA aids captains and navigators in avoiding collisions by providing accurate and timely data on the trajectories of ships, enabling informed decisions regarding course management.
ARPA
4
AVCS (Admiralty Vector Chart Service) is a service that provides electronic navigational charts (ENC) developed by the UK Admiralty. These charts are used in the ECDIS system for safe and efficient navigation. AVCS includes a wide range of vector charts covering international sea routes, ports, and coastal areas. Using AVCS allows shipowners and navigators to access accurate and up-to-date navigational data essential for route planning and ensuring safety at sea.
AVCS
5
BAM (Bridge Alert Management) is a system designed to optimize and streamline the alert processes on a ship's bridge. BAM consolidates and categorizes various alarms and alerts from navigational equipment and ship management systems, displaying them on a single interface. This enables the crew to manage and respond to situations more effectively, minimizing the risk of errors and enhancing overall navigational safety.
BAM
6
BNWAS (Bridge Navigational Watch Alarm System) is a system designed to monitor the activity of the watchkeeping officer on a ship's bridge to ensure their constant presence and alertness. BNWAS periodically requires the watch officer to confirm their activity by pressing a button or performing another action. If there is no response within a set period, the system starts issuing audible and visual alarms, first on the bridge and then in the senior officers' living quarters. This helps prevent watch officer fatigue or loss of concentration, thereby enhancing overall navigational safety.
BNWAS
7
CAM (Central Alert Management) is a system designed for the centralized management and coordination of alarms and alerts on a vessel. CAM collects, processes, and displays information from various ship systems and sensors, allowing the crew to quickly respond to any incidents or malfunctions. The system helps minimize reaction times to emergencies and ensures more efficient management of the ship's safety and operations.
CAM
8
Cb (Block Coefficient) is a dimensionless number used in shipbuilding to determine the fullness of a ship's hull form. The Block Coefficient is calculated as the ratio of the volume of the underwater portion of the hull to the volume of a rectangular prism (block) with the same length, breadth, and draft. Cb values range from 0 to 1, with higher values indicating a fuller hull. This parameter is crucial for evaluating the hydrodynamic characteristics of a ship, such as water resistance and fuel efficiency.
Cb
9
CPA (Closest Point of Approach) is a term used in maritime navigation to determine the minimum distance that two vessels will approach each other if they continue on their current speed and course. It is calculated to prevent collisions and enhance safety at sea. Determining the CPA allows captains and navigators to take timely corrective actions, such as changing course or speed, to avoid dangerously close encounters with other vessels.
CPA
10
COG (Course Over Ground) is the direction of a vessel's movement relative to the earth or ground, meaning the actual path the vessel takes over the land, rather than the water. This parameter indicates the angle at which the vessel is moving relative to true north, accounting for all influences such as currents and wind that may cause deviations from the intended course. The COG value is important for accurate route planning and navigation, especially in changing meteorological and oceanographic conditions.
COG
11
CCRP (Consistent Common Reference Point) is a coordinate system or point used in navigation systems and cartographic applications to ensure consistency and accuracy of data. CCRP provides uniformity in the interpretation and display of data such as vessel positions, routes, and other critical navigational elements. This is especially important for integrating data from various sources and systems to ensure that all data is correctly aligned and displayed on the same coordinate base.
CCRP
12
CTS (Course To Steer) is the course that a vessel should follow to reach a specified destination or waypoint. This parameter is commonly used in navigation systems and route planning to indicate the heading required for optimal progress. The course to steer takes into account factors such as current conditions, wind direction, currents, and other navigational elements to ensure safe and efficient travel towards the intended goal.
CTS
13
CTW (Course Through the Water) refers to the heading that a vessel follows relative to the water, without accounting for the effects of currents and winds. This value is crucial for understanding the vessel's actual direction of travel across the water surface, as opposed to the Course Over Ground (COG), which factors in the influence of external elements. Course Through the Water helps navigators determine how the vessel's movement is affected by the current direction and speed and wind conditions.
CTW
14
DB (Database) refers to a structured repository of information used for storing, managing, and processing data. In the context of ECDIS (Electronic Chart Display and Information System), a database may include cartographic data, navigational objects information, and other essential details required for effective navigation planning and execution. Databases enable the system to quickly and accurately retrieve information to ensure safety and optimize routing.
DB
15
DR (Dead Reckoning) refers to a method of determining a vessel's current position based on its previous position and information about its course and speed. Using dead reckoning, the vessel's estimated position is calculated based on its movement over a specific period. This method is crucial for navigation, especially when data from navigational sensors, such as GPS, is unavailable. Dead reckoning helps in estimating the vessel’s current position, which is important for route planning and evaluating the accuracy of navigational data.
DR
16
DTS (Distance to Go) refers to the distance remaining to reach a specified destination or waypoint. This parameter helps in determining how much further the vessel needs to travel to reach its target, which is important for estimating arrival times and optimizing the course. Distance to Go is calculated based on the vessel's current position and the predefined route, and it updates as the vessel progresses towards the destination.
DTS
17
DWOL (Distance to Wheel Over Line) refers to the distance remaining until the vessel needs to begin turning to follow the planned route. The Wheel Over Line indicates the point on the route where a course change is required to navigate the next segment of the course. The DWOL parameter assists the navigator in planning and adjusting the vessel's course to ensure a smooth and accurate transition to the subsequent part of the route.
DWOL
18
EBL (Electronic Bearing Line) is a tool in electronic navigation systems that allows the display and tracking of the bearing from the vessel to a specific target or object on the screen. The Electronic Bearing Line represents a line drawn from the vessel in a specified direction, assisting the navigator in determining and monitoring the relative bearing to the target. It is particularly useful for assessing directional changes and determining a safe course while maneuvering.
EBL
19
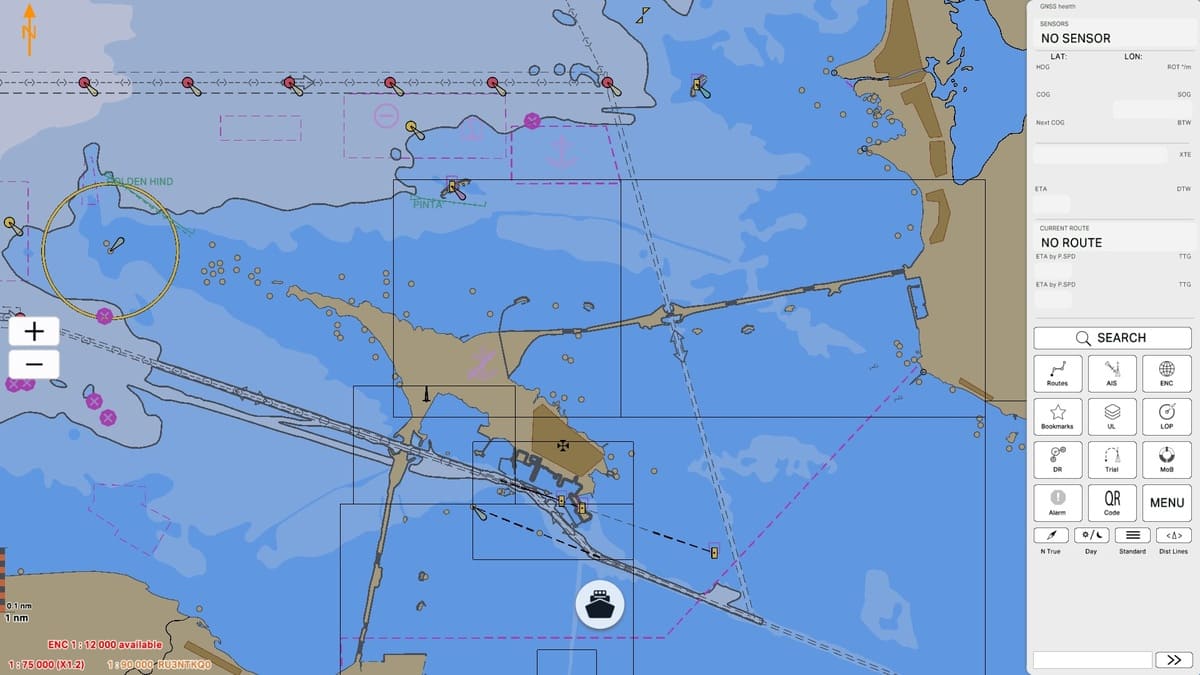
ECDIS (Electronic Chart Display and Information System) is an electronic navigation system that integrates electronic navigational charts and vessel information into a single system. ECDIS is used for displaying and managing navigational data, providing the navigator with up-to-date information on the vessel's position, surrounding environment, hazards, and other critical data. It significantly enhances the accuracy and safety of navigation compared to traditional paper charts.
ECDIS
20
ECS (Electronic Chart System) is a system designed for displaying electronic charts and managing navigational data. ECS is used for visualizing and analyzing data on electronic charts, providing the navigator with information about the vessel's current position, surrounding conditions, and potential hazards. Unlike ECDIS, ECS may not always meet international standards for official navigation use but still offers a significant improvement over paper charts.
ECS
21
ENC (Electronic Navigation Chart) is a type of electronic chart used in ECDIS systems for navigation. ENC is an official digital chart format that includes all necessary navigational data such as coastline contours, deep water zones, navigation marks, and warnings. These charts are created and updated by national hydrographic offices and are standardized to ensure accuracy and compatibility. ENC provides high precision and up-to-date information, aiding in safe and efficient vessel management.
ENC
22
ENP (Electronic Navigation Publication) refers to a digital format of publications that contain navigational data and information intended to support safe and efficient maritime navigation. ENP can include various types of information such as navigation directives, hydrographic data, lists of light signals, ice condition charts, and other necessary data for effective planning and execution of sea voyages. These publications are updated electronically, simplifying access to current information and enhancing the accuracy of navigational data.
ENP
23
ETA (Estimated Time of Arrival) is the forecasted time when a vessel is expected to reach its destination. ETA calculations are based on the current course, vessel speed, weather conditions, and other factors. ETA assists in planning subsequent actions, such as coordinating with port authorities, scheduling loading/unloading operations, and adhering to time schedules. This information is also crucial for safe maneuvering and effective time management during the voyage.
ETA
24
ETD (Estimated Time of Departure) is the forecasted time when a vessel is scheduled to depart from a port or starting point of the voyage. ETD calculations are based on various factors, such as the completion of cargo operations, the vessel's technical condition, obtaining necessary permits, and weather conditions. ETD assists in organizing and coordinating the departure processes, including planning loading, crew preparations, and completing all necessary administrative tasks. This information is also important for forecasting arrival times at the destination port and effectively managing schedules.
ETD
25
FW (Fresh Water) refers to freshwater onboard a vessel. Freshwater is used for various purposes, such as drinking, cooking, personal hygiene, and maintenance of equipment. Vessels may have a freshwater storage and distribution system, including tanks, pumps, and filters, to ensure a supply of quality water throughout the voyage. Managing freshwater supplies is crucial for crew comfort and the safe operation of the vessel.
FW
26
GNSS (Global Navigation Satellite System) refers to a constellation of satellites designed to provide geospatial information, including location, velocity, and timing. GNSS includes several systems, such as GPS (USA), GLONASS (Russia), Galileo (EU), and BeiDou (China). These systems offer global coverage and enable accurate determination of coordinates and movement of objects. GNSS is used in maritime navigation, vehicle tracking, mapping, environmental monitoring, and many other applications.
GNSS
27
ID (Identification) is a unique identifier used to distinguish and identify objects, users, or data within a system. In the context of ECDIS and navigation systems, an ID may refer to a unique code assigned to a vessel, ship, buoy, navigation equipment, or data. This enables precise tracking and management of various objects and their information, as well as preventing confusion and errors associated with similar or identical objects.
ID
28
LOP (Lines of Position) are lines on a navigation chart used to determine the location of a vessel or object. Lines of Position are drawn based on data from various navigation instruments, such as radar stations, radio beacons, or GPS. The intersection of multiple lines of position provides an accurate location on the chart. This method is used for calibrating and verifying the current position of a vessel, as well as determining its precise location in complex navigation situations.
LOP
29
LW (Low Water) refers to the water level that is reached during low tide in tidal cycles. Low Water is indicated on nautical charts and navigation publications and is used to assess depths and hazards that may only become visible at low water levels. Knowing LW values is crucial for safe route planning and preventing the risk of collisions with underwater obstacles or shoals.
LW
30
MMSI (Maritime Mobile Service Identity Number) is a unique nine-digit number assigned to maritime vessels, shore-based stations, and other entities using radio communications for navigation and communication purposes. MMSI is used for identifying ships and stations in radio systems such as AIS (Automatic Identification System) and DSC (Digital Selective Calling), enhancing safety and coordination at sea. This number allows other maritime traffic participants to view information about the vessel and establish communication with it.
MMSI
31
NOAA (National Oceanic and Atmospheric Administration) is a U.S. government agency that focuses on the study and forecasting of oceanic, atmospheric, and climatic conditions. NOAA is responsible for collecting data on weather, climate, oceans, and marine ecosystems, as well as providing forecasts and warnings for adverse weather conditions, natural disasters, and climate changes. The information and forecasts provided by NOAA are crucial for navigation, maritime safety, and environmental monitoring.
NOAA
32
PI (Parallel Indexing) is a method used in electronic chart systems to simplify data access. In the context of ECDIS (Electronic Chart Display and Information System), parallel indexing helps to efficiently organize and quickly retrieve information from large datasets, such as nautical charts and navigation publications. This approach reduces the time required for searching and processing data, enhancing the overall performance of the system and providing faster access to critical navigation information.
PI
33
ROT (Rate of Turn) refers to the speed at which a vessel changes its direction or heading. In ECDIS and other navigation systems, ROT helps mariners manage and control vessel maneuvers, such as turns and course changes. The rate of turn is measured in degrees per minute and is used to predict changes in the vessel's trajectory, which is essential for safe and efficient navigation.
ROT
34
SENC (System Electronic Navigation Chart) refers to a data format used in ECDIS systems for displaying electronic navigation charts. Unlike ENC (Electronic Navigation Chart), which is a standard data format for chart information, SENC is an optimized format specifically prepared for use in ECDIS. It contains all the necessary data for displaying and interpreting charts on the screen, including maritime navigation objects, text annotations, and other important elements. SENC facilitates the navigator's work by providing fast and accurate processing of chart information in real time.
SENC
35
SOG (Speed Over Ground) is a parameter used in navigation systems and ECDIS to measure the speed of a vessel relative to the land. This parameter reflects the actual speed at which the vessel is moving over the earth's surface, regardless of the influence of currents or wind. Unlike Speed Through Water (STW), which only accounts for the speed relative to the water, SOG provides a more accurate representation of the vessel's true movement. The use of SOG is crucial for accurately determining the vessel's position, planning routes, and managing the vessel under various navigation conditions.
SOG
36
SOLAS (Safety of Life At Sea) is an international convention aimed at ensuring the safety of shipping and protecting lives at sea. Adopted by the International Maritime Organization (IMO), SOLAS sets mandatory requirements for ship construction, equipment, and operational practices to minimize risks and ensure safety at sea. The convention covers various aspects, including lifesaving appliances, signaling systems, crew training, and emergency management. Adhering to SOLAS requirements is crucial for ensuring safe maritime transportation and protecting the lives of seafarers.
SOLAS
37
S52 is the International Hydrographic Organization (IHO) standard for the presentation of symbols on Electronic Navigational Charts (ENC). The S52 standard defines how various chart elements should be visualized on ECDIS displays to ensure consistent and clear representation of navigational information. This includes rules for the display of symbols, colors, fonts, and instructions for interpreting chart data to ensure accuracy and usability. The S52 standard helps mariners interpret information on electronic charts correctly, contributing to safe and effective navigation.
S52
38
S57 is the International Hydrographic Organization (IHO) standard for the exchange of Electronic Navigational Chart (ENC) data. The S57 standard defines the format and structure of the data used for exchanging and storing electronic chart information. It ensures consistency and compatibility between different systems and applications that use ENCs. This includes specifications for data exchange, object descriptions, attributes, and metadata, facilitating the integration and accurate interpretation of chart data across different navigation devices and systems.
S57
39
S63 is the International Hydrographic Organization (IHO) standard for the protection of Electronic Navigational Chart (ENC) data. The S63 standard provides security and data protection through cryptographic techniques and access control mechanisms. It includes methods for data encryption, authentication, and version control to prevent unauthorized access, tampering, or alteration of chart data. This standard is crucial for ensuring the reliability and integrity of navigational information provided through electronic navigation systems.
S63
40
S64 is the International Hydrographic Organization (IHO) standard for test data sets used to verify and validate software and equipment related to Electronic Navigational Charts (ENC). The S64 standard provides a set of test data that allows developers and operators to check the accuracy of chart data processing, system compatibility, and compliance with standards. Utilizing the S64 test data set helps ensure the correct functioning of navigational systems and improves their quality.
S64
41
TCP (Transmission Control Protocol) is one of the core protocols in the Internet protocol suite (TCP/IP) that provides reliable, ordered, and error-checked delivery of data between computers on a network. TCP ensures that data is delivered without loss, out-of-order, or duplication, and guarantees that data reaches its destination in the correct order. This is crucial for maintaining the stability and reliability of communications in navigational systems like ECDIS, where accurate data transmission is essential for safe navigation.
TCP
42
TCPA (Time to Closest Point of Approach) is the calculated time remaining until the closest point of approach (CPA) between two vessels is reached. This information allows navigators and automated systems, such as ECDIS, to predict potential collisions and take necessary actions to prevent accidents. TCPA assists in maneuver planning and ensuring navigational safety by providing timely data for course or speed adjustments.
TCPA
43
TDTG (Total Distance to Go) refers to the total distance remaining to reach the planned destination point. This parameter is crucial for route planning and vessel management, as it helps in estimating the remaining travel time and making decisions regarding course or speed adjustments. TDTG is used in ECDIS systems to display information about the current progress and remaining distance, enabling the crew to manage navigation and vessel resources more effectively.
TDTG
44
TSS (Traffic Separation Scheme) is an organizational system implemented in specific maritime areas to separate opposing flows of vessels and ensure orderly navigation. These schemes are designed and applied to enhance safety in busy and complex waterways, such as approaches to major ports or channels between islands. Within a TSS, specifically marked lanes are created for vessels moving in each direction, along with maneuvering and waiting areas. TSS helps to prevent collisions and facilitates the management of traffic in areas with heavy maritime activity.
TSS
45
UKC (Under Keel Clearance) refers to the critical measurement used to ensure safe navigation. It represents the distance between the lowest point of a vessel's keel and the seabed. Proper determination and monitoring of UKC are crucial for avoiding hull damage due to contact with the bottom, especially when navigating shallow waters or dealing with changing water levels. UKC takes into account factors such as the vessel's draft, water level fluctuations (e.g., tides), and potential changes in depth due to shifting channels or sediment. Effective management of UKC helps prevent accidents and ensures safe vessel operation under varying conditions.
UKC
46
UKHO (United Kingdom Hydrographic Office) is a government agency of the United Kingdom responsible for the production and distribution of maritime charts, navigational publications, and other hydrographic data. UKHO ensures the accuracy and up-to-date status of charts and data used for safe navigation globally. Its main functions include collecting and processing seabed data, updating nautical charts, publishing navigational warnings, and supporting international hydrographic standards. UKHO also contributes to the development and maintenance of international standards such as those established by the International Hydrographic Organization (IHO).
UKHO
47
UDP (User Datagram Protocol) is one of the core transport layer protocols used in network communications. It provides a simple and fast method for transmitting data across a network without establishing a connection between the sender and receiver. UDP does not guarantee data delivery, ordering, or integrity checks, making it less reliable compared to other protocols like TCP (Transmission Control Protocol). However, UDP is often used in applications where high-speed transmission and minimal latency are crucial, such as streaming audio and video, as well as real-time systems.
UDP
48
VDR (Voyage Data Recorder) is an on-board device designed to record and store critical information about a vessel's voyage. The VDR captures data such as the ship's course, speed, coordinates, the status of various systems and equipment, as well as audio recordings and radio communications. This data can be used for incident analysis, investigations, and enhancing maritime safety. VDR aids in reconstructing events in the event of an accident and provides crucial information for ensuring compliance with safety standards.
VDR
49
VRM (Variable Range Marker) is a tool used in radars and electronic chart display systems that allows for the placement of a variable-radius circle on the screen to measure distances. The VRM is used to gauge the distance between the vessel and objects displayed on the radar screen, as well as to measure distances to various targets or objects, such as buoys, other vessels, or coastal landmarks. This tool is essential for maneuver planning, maintaining safe distances, and navigation in scenarios where precise distance measurement is crucial for safety.
VRM
50
VTS (Vessel Traffic Services) is a system designed to provide information and support for the management of vessel traffic in specific maritime or riverine areas. The primary goal of VTS is to ensure safe and efficient navigation, prevent collisions, and provide assistance when needed. VTS involves monitoring vessels, managing traffic, disseminating information about weather conditions, navigational hazards, and other critical data to mariners. These services are crucial for managing vessel movement in ports, near shorelines, and in other busy or complex waterways.
VTS
51
WPT (Waypoint) is a specific geographical location used in navigation for planning and tracking routes. Waypoints are typically marked on maps or within navigation systems and serve as reference points for mariners and pilots. They are used to determine a vessel's or aircraft's path, calculate course, and facilitate automated navigation, such as with autopilots. In ECDIS systems and other navigation tools, waypoints are crucial for creating and following routes, ensuring accuracy and safety in navigation.
WPT
52
The "Terms & Abbreviations" section has been completed.
Success!